
NT$2,980
YOLOv11課程更新通知
YOLOv10課程更新通知
最新YOLOv9課程更新
【課程更新預告】YOLOv9 課程更新影片即將於 6/21 上架!
最新YOLOv8課程更新
【課程更新預告】YOLOv8 課程更新影片即將於 8/7 上架!
跨年上課去,課程字幕上架啦~
單元七學習重點
單元五: 運用YOLOv3實現Muti-Label 物件偵測模型 學習重點
【課程上架快報】L7~L8
課程資訊
YOLOv11課程更新通知
適合對象
- 想學習深度學習,並將深度學習應用於專案
- 具備程式設計能力,但不具備開發 AI 功能,希望能擴展 AI 應用
- 有機器學習模型開發經驗,想進一步的透過深度學習模型提升開發效能
- 想學習深度學習在電腦視覺上的應用,以增加就業機會。
- 數學或統計相關科系畢業,想增加自身技能
你可以學到
| 帶你精準掌握物件偵測的應用與優化
近年來,影像辨識技術持續帶來前所未有的精度,從2015年 YOLOv1 橫空出世,大部份的即時物件偵測系統都是應用 YOLO,這套開源技術在辨識率和速度都有很好的平衡並持續突破,隨著物件的多樣與持續進化的演算法,會需要更多的評估指標(如 mAP),來處理複雜的影像識別。
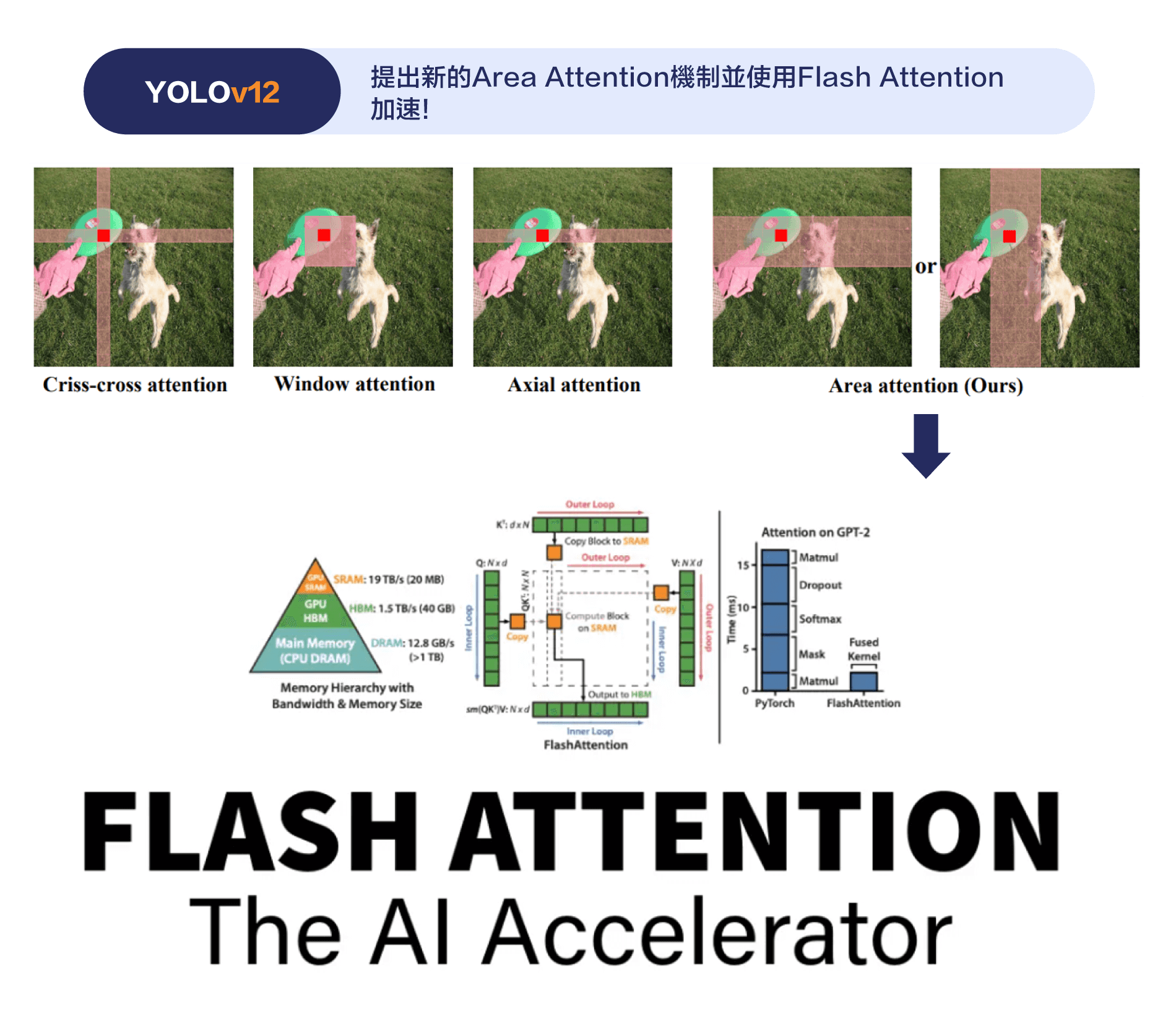
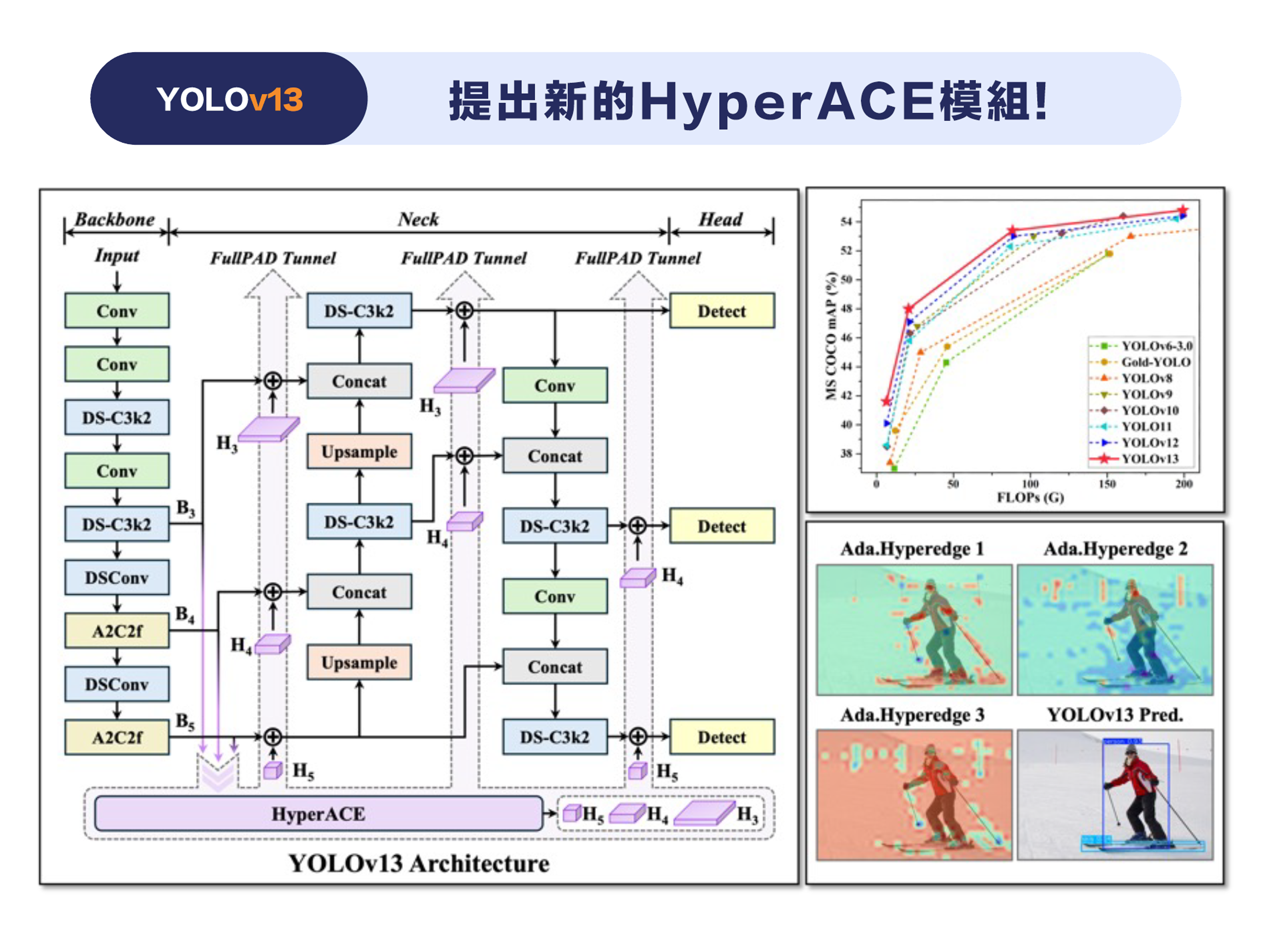
| 以下實作問題,你都能清楚回答嗎? 我知道 YOLOv1 無法偵測重心在同一個 grid cell 的不同類物體,但 YOLOv2 可以 我知道 YOLOv3 可以實現單一物體多類別的偵測與辨識 我知道 YOLOv4 使用了哪些 trick,使得 mAP 大幅提升 我知道 YOLOX 的 Decoupled head 對辨識率的影響有多大 我知道 YOLOV5 可以整合複數個模型的結果使得偵測效果更好 我知道 YOLOX 發現訓練最後把 data augmentation 關掉結果會更好 我知道 YOLOV7 透過結構重參數化,可以連一步加速推論的速度 我知道 YOLOV8 結合可平行化的超參數最佳化函式庫幫助使用者最佳化在特定資料集效能 我知道 YOLOv9 進一步優化只有訓練時才存在的網路結構以得到更好的結果 我知道 YOLOv10 可以在辨識率略降的情形下捨棄耗時的後處理-Non-Maximal-Suppression 我知道 YOLOv11 為什麼相較過去版本,可以在相同辨識率下速度更快 我知道YOLOv12提出了怎樣的新注意力機制達到較佳的AP-Latency比 我知道YOLOv13提出的HyperACE跟注意力機制有什麼樣的差別 我知道在我的應用中,使用哪一代的YOLO可以得到更好的結果 跟著本課程學習 "面試最常問" & "比賽最常用" 的演算模型 |
| 一次洞悉所有 YOLO 模型訓練技術
本課程將完整解析各種 YOLO 版本,包含理論介紹與實作,實作內容還包括了如何修改,讓這些模型使其能在客製化的資料集上完成訓練。
| 直通最新版 YOLOv13.三大需求一次滿足
10+小時 x 20+實作 x 9+模型,額外增加 2025 最新的 YOLOv13 版本!
- 最完整:YOLOv1~YOLOv13 原理解說.模型差異.技術應用
- 最實用:涵蓋多產業與場域應用示範
- 最有效:集電腦視覺、機器學習、深度學習專業於一身的 AI 技術專家,帶你掌握技巧,親自教到你會!

| 進入課程就能隨學即用
學習全球當紅 YOLO,提升與擴展 AI 實務應用技能,幫助你解決工作與專案的各種困境!
適合的學習對象:
➔想學習深度學習並將深度學習應用於專案
➔具備程式設計能力但不具備開發 AI 功能,希望能擴展 AI 應用
➔有機器學習模型開發經驗,想進一步的透過深度學習模型提升開發效能
➔想學習深度學習在電腦視覺上的應用增加就業機會
➔數學或統計相關科系畢業想增加自身技能
課程介紹
| 解析 YOLO 優勢.該選用哪一個版本?怎麼用不踩雷?
面對 YOLO 物件偵測模型的各種衍生版本,你需要清晰的教學脈絡,學習如何分辨其中的差異、如何挑選最適版本,又該如何正確運用。如果你想要著重於即時性的物件偵測,亦或者需要極高辨識率但不強調即時性的應用,都可以在這門課程中找到解答。
課程重點
✔ 物件偵測與物件偵測資料集
✔ 計算物件偵測最重要的指標-Average Precision
✔ 依照應用需求來選擇一種最佳的模型
✔ 有系統的調整超參數以提升辨識率
✔ 比較不同模型在同一個資料集上的辨識率差距
✔ 修改模型以達成在客製化不同資料集上的訓練
✔ 透過 Optuna 最佳化模型的超參數運用
✔ 修改模型以達到 Multi-label 的物件偵測
✔ 透過自動化調整超參數來顯著提升辨識率
| PyTroch × YOLO 物件偵測實作
每個單元都有搭配實作,你將能了解如何應用模型、修改模型、調整模型達成客製化實務需求,包含通用物體偵測操作、比較不同模型在同一個資料集上的辨識率差距。








| AI 深度學習專家-林哲聰 老師

| 提供完整學習資源
- 課程教材下載,講義為全英文:提供完整教材簡報,在學習過程中即時做好重點筆記,複習更方便。
- 授課語言為中英參雜(比例約7:3): 語法應用的實作帶領,在影片中會搭配中文語意解釋,既不用擔心聽不懂,又可讓你在學習同時,自然而然的習得使用 YOLO 技術做影像辨識,自己查詢解決方案的英文關鍵術語!
- 課後單元測驗多以英文呈現:每個模組都會有課後評量,透過題目反覆練習讓你了解學習。
- 課程重複觀看:不限時間、不限次數,皆可反覆觀看課程影片進行複習。
- 課程討論區:有任何學習問題皆可在討論區發問,專業講師將會替你答題解惑

學習前基本能力
- Python 程式基礎
- 具備機器學習/電腦視覺/深度學習基本概念
- 線代、統計基本概念
學習前準備
- 電腦裝置(不限廠牌、作業系統不限)
- 本課程所有的程式都使用 PyTorch 在 Colab 此雲端平台上開發(Google 帳號:用於登入 Google 的Colab 雲端程式開發平台)
- 為一次性購買的線上課程、擁有永久觀看權、可以無限次回放觀看複習和討論區提問與交流

學習時遇到挫折好焦慮啊,可是又不敢發問嗎?
免煩惱!在緯育 TibaMe 的「課程討論區」歡迎提問,不用擔心自己是否會問錯問題,只要你是認真學習且積極發問的態度,獲取的知識都是屬於你自己的寶藏哦,而且還能幫助討論區的其他同學一起互相觀摩、學習,共同提升學習成效,一舉多得!
還有其他對於 緯育 TibaMe 的問題?
歡迎點選 FAQ,你將可以得到更多解答哦!
課程資訊
關於講師

林哲聰
經歷|
▻ 瑞典Chalmers University of Technology博士後研究員
▻ 工研院機械所副研究員/研究員/資深研究員
▻ 馬來西亞10 EPOCH科技公司研發顧問
▻ 馬來西亞偉特科技公司(ViTrox)研發顧問
▻ 加州大學聖塔芭芭拉分校資工系訪問研究員
▻ 工研院產業學院講師
▻ 清華大學自強基金會講師
專長|
電腦視覺、機器學習、深度學習及其在駕駛輔助系統以及自駕車之各種應用
獲獎經驗|
▻ 2020 中華民國資訊學會碩博士最佳論文獎-博士論文佳作
▻ 2020 中華民國影像處理與圖形識別學會第十三屆博碩士論文獎-博士論文佳作
▻ 2020 AI智慧應用新世代人才培育計畫-人才解題實證(倒車攝影機影像識別-障礙物與逼近偵測): 佳作
▻ 2019 IEEE ICIP Three Minute Thesis Competition (3MT®): Finalist
▻ 2018 第八屆兩岸清華研究生學術論壇 清華大學代表
▻ 2017 CVGIP 行人偵測競賽 亞軍
▻ 2017 MOST 生成式對抗網路競賽 佳作
▻ 2016 日本立命館大學英文演講比賽 清華大學代表
▻ 2013 伽利略創新大賽 瑞士區冠軍
▻ 2011 伽利略創新大賽 特別獎(GNSS Living Lab)得主
▻ 2010 伽利略創新大賽 台灣區季軍
學習附件

目前尚無任何討論主題
成為第一個發問的人!在問答中找到學習的捷徑。關於講師
林哲聰
經歷|
▻ 瑞典Chalmers University of Technology博士後研究員
▻ 工研院機械所副研究員/研究員/資深研究員
▻ 馬來西亞10 EPOCH科技公司研發顧問
▻ 馬來西亞偉特科技公司(ViTrox)研發顧問
▻ 加州大學聖塔芭芭拉分校資工系訪問研究員
▻ 工研院產業學院講師
▻ 清華大學自強基金會講師
專長|
電腦視覺、機器學習、深度學習及其在駕駛輔助系統以及自駕車之各種應用
獲獎經驗|
▻ 2020 中華民國資訊學會碩博士最佳論文獎-博士論文佳作
▻ 2020 中華民國影像處理與圖形識別學會第十三屆博碩士論文獎-博士論文佳作
▻ 2020 AI智慧應用新世代人才培育計畫-人才解題實證(倒車攝影機影像識別-障礙物與逼近偵測): 佳作
▻ 2019 IEEE ICIP Three Minute Thesis Competition (3MT®): Finalist
▻ 2018 第八屆兩岸清華研究生學術論壇 清華大學代表
▻ 2017 CVGIP 行人偵測競賽 亞軍
▻ 2017 MOST 生成式對抗網路競賽 佳作
▻ 2016 日本立命館大學英文演講比賽 清華大學代表
▻ 2013 伽利略創新大賽 瑞士區冠軍
▻ 2011 伽利略創新大賽 特別獎(GNSS Living Lab)得主
▻ 2010 伽利略創新大賽 台灣區季軍

瀏覽班種
培訓模式
說明會/專人諮詢
企業方案
人才媒合/企業徵才