圖片分類應用:動物圖片辨識



超高CP值|2堂線上課程+7次直播課程
本期直播日期:5/12、5/19、5/26、6/2、6/9、6/16、6/23
本期直播時間:19:00~21:30. (06/09: 19:00~21:00)
限時早鳥45折


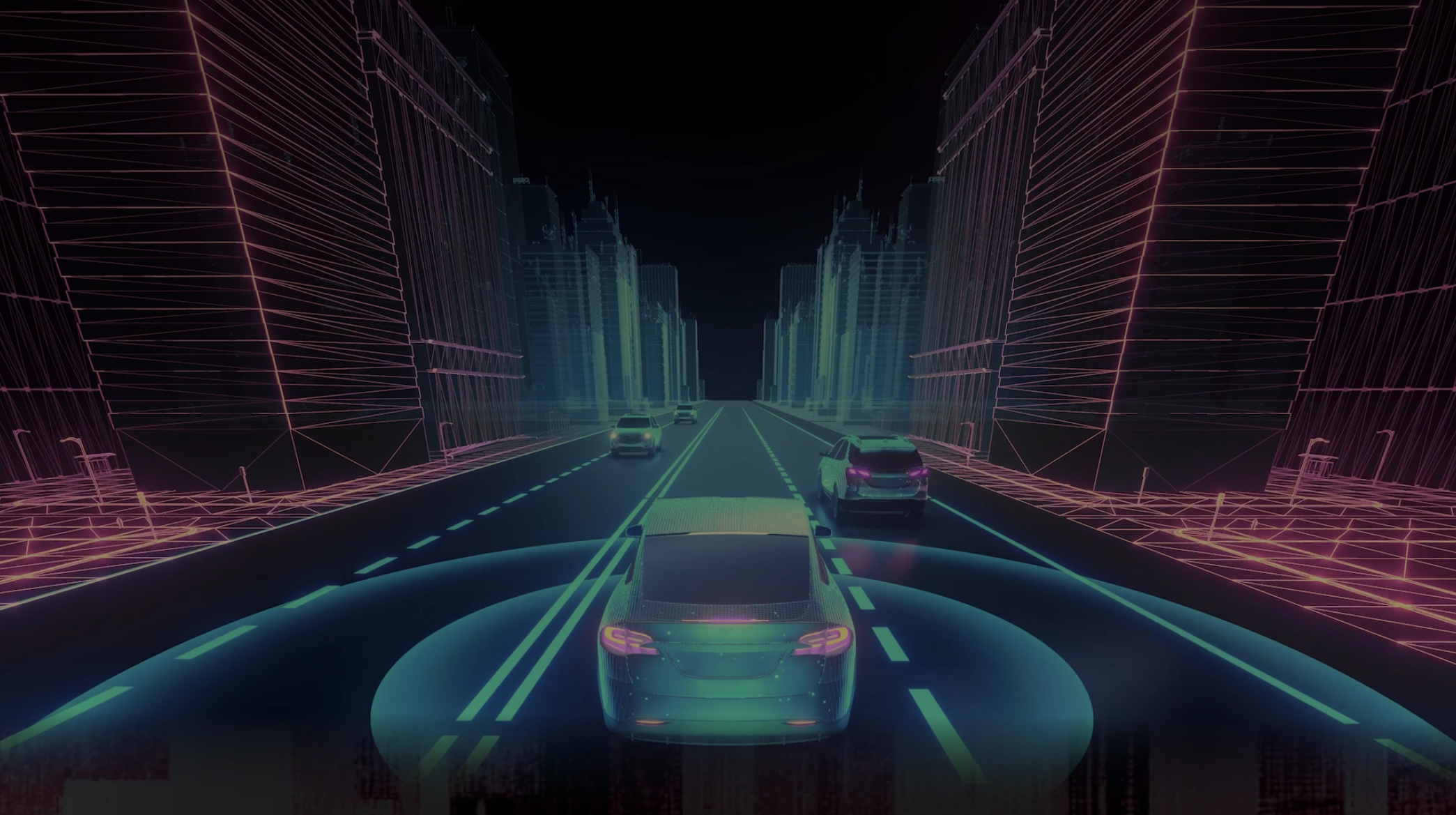
關鍵專題:Multi-Tasking (BEV) CNN/Transformer:打造自駕車空間理解能力
帶領學員實際結合 Bird's-Eye-View (俯瞰圖) 與 Vision Transformer 模型,應用於自駕車領域,解決過去傳統模型一次僅能看到單一視角的痛點。透過建立鳥瞰視角,模擬真實世界的空間幾何關係,強化 AI 對車輛周遭環境的整體理解與預測能力,實現更智慧的路徑規劃與動態行車決策。

影像分割:SAM 模型
物件偵測模型:物體追蹤

自動駕駛系統 :BEV+ Transformer 的應用
生成式對抗網路(GAN)實作
Stable Diffusion 影像生成及其微調

CNN
專為圖像設計的效率之王
卷積神經網路 (CNN) 是為影像任務量身打造的深度學習架構,透過局部感知與權重共享的設計,能有效擷取圖像中的局部特徵,從淺層到紋理層層提取,組成深層語意。
CNN 在圖像分類、物件偵測與醫學影像分析等任務中穩居主流,運算成本低、訓練效率也高,是對資源有限環境最為友善的選擇。

Transformer
打破空間限制,開啟影像理解新紀元
不再依賴固定視窗與鄰近像素,Vision Transformer (ViT) 運用自注意力機制,讓模型得以「全圖觀察」,同時關聯圖像中任意兩點的資訊,抓住全局語意與微妙互動。
Transformer 技術成功結合 CNN 的層級特徵與自身的建模能力,大幅提升影像分類、分割與生成任務的表現。

你將學到:
Transformer 在影像辨識的革新應用
從分類、偵測到語義分割,掌握 Vision Transformer 帶來的全新視覺處理模式

自駕車核心技術與實戰開發流程
了解自駕車視覺系統如何識別道路環境、障礙與車輛動態
生成對抗網路 (GAN) 模型的多元應用
從圖像合成、風格轉換到數據增強,深入理解 GAN 如何打造新視覺可能
Stable Diffusion 的生成原理與實務運用
解析 AI 繪圖背後的數學機制,並應用於創意圖像生成與內容設計



深度學習實戰-影像辨識篇
本課程將從深度學習的理論出發,在近年來最受歡迎的深度學習框架-PyTorch上使用Python撰寫模型訓練、測試以及佈署程式。實作的部份除了基本的影像分類外,還包括物件偵測、影像分割甚至是人臉生成等應用。這門課的最終目標是能讓學員具備打造深度學習模型的能力,以解決電腦視覺中的各種任務。

PyTorch 生成模型全解析|從生成式對抗網路到擴散模型
想跟上生成模型最新發展,理解其原理,但困於論文和程式碼?本課程從生成式對抗網路原理出發,教你運用擴散模型輕鬆創造影像,10小時密集學習,深入介紹GAN和擴散模型差異,學會影像轉換、影像生成及文字轉影像等技術,還教授運用Stable Diffusion的各種變型,透過大量實作,讓你輕鬆應用各項專案。

老師特別為「AI影像工程師特訓班」設計了「專屬提問時間」── 透過第五週2小時的提問時間,針對同學提出的問題一一解惑。為你深入解答難點,輕鬆應對專題實作。
無論是技術卡關還是實作疑惑,都能獲得即時有力協助,讓學習不留死角!




登入
免費註冊
立即加入成為Line官方好友

返回主選單
返回主選單
瀏覽班種
培訓模式
說明會/專人諮詢
返回主選單
企業方案
人才媒合/企業徵才
返回主選單
返回主選單
返回主選單
返回主選單
返回主選單